






何を探していますか
?

SINOSO多機能果樹園ロボット 現代の農業に革命をもたらしています。200多機能果樹園ロボットや400多機能果樹園散布ロボットといった先進的な農業ロボットは、散布、収穫など、信頼性の高い自律型ソリューションを提供します。以下の機能により、効率性が向上します。
特徴 | メトリック |
|---|---|
カバレッジ効率 | 1時間あたり5.93エーカー |
散布範囲 | 最大幅15メートル |
地形適応性 | クローラーシャーシ、強力な登坂力 |
SINOSO の最先端技術を搭載したこれらの多機能果樹園ロボットは、正確なナビゲーション、モジュール式ツールの互換性、および適応型散布システムを提供し、労力の削減、化学薬品の使用量の低下、農業作業全体の安全性の向上を実現します。

SINOSO SOROB 200 のような多機能果樹園ロボットは、散布、除草、収穫などの多くの作業を実行し、時間を節約し、複数の機械の必要性を減らします。
これらのロボットは、化学薬品散布などの危険な作業を処理し、作業者の有害物質への曝露や身体的負担を軽減することで安全性を向上させます。
自律ナビゲーションとスマート センサーにより、ロボットは不整地や狭い果樹園の列でも効率的に作業できるため、生産性が向上し、人件費が削減されます。
精密な噴霧とターゲットを絞った処理により、化学物質の使用量を最大 40% 削減し、環境を保護し、経費を削減します。
ロボット収穫機は、高い精度で一貫した果物収穫を実現し、モジュール設計により、作業間の素早い切り替えが可能になり、果樹園のニーズの変化に適応します。
多機能果樹園ロボットを導入することで、果樹園の作業効率を大幅に向上させることができます。これらのロボットは、自律移動、インテリジェントセンサー、精密マニピュレーターを組み合わせ、除草、散布、収穫などの作業を実行します。作業ごとに専用の機械を複数台必要とする必要はもうありません。モジュール設計によりツールを素早く切り替えることができるため、除草、運搬、耕作を1つのプラットフォームで処理できます。SINOSO SOROB 200などの農業用ロボットは、コンパクトなクローラーシャーシで動作し、狭い果樹の畝や不整地でも容易に移動できます。
自動化により反復作業が効率化され、労働集約度と運用の複雑さが軽減されます。人件費の削減とリソース配分の改善といったメリットが得られます。AIと自己学習アルゴリズムを搭載したロボットは、変化する作物の形状や環境条件に適応します。この適応性により、年間を通しての使用が可能になり、稼働率と投資収益率が向上します。実運用では、多機能果樹園ロボットが、化学薬品使用量の40%削減や土壌分析コストの大幅な削減など、目に見える効率向上をもたらすことが実証されています。
特徴 | 利点 |
|---|---|
モジュラー拡張 | マルチタスク機能 |
コンパクトなデザイン | 簡単なナビゲーション、低コスト |
全地形対応シャーシ | どこでも信頼できる操作 |
精密スプレー | 廃棄物の削減、生産性の向上 |
農業用ロボットはリスク軽減において重要な役割を果たします。人間工学に基づいた設計と安全性を重視したエンジニアリングを備えたロボットを使用することで、職場における事故を最小限に抑えることができます。小型軽量の機械は、大型トラクターに比べて身体への負担を軽減します。ロボットは薬剤散布などの危険な作業も行うため、作業者は直接曝露されることはありません。自律走行、遠隔監視、スマートアラートなどの機能により、安全性がさらに向上します。
複雑な果樹園環境において、人間と共存し自然な協調作業をサポートする協働ロボットは、お客様にとって大きなメリットとなります。これらのロボットは、反復動作や重い荷物の持ち上げを担うことで、筋骨格系の障害の予防に役立ちます。安全保証システムとインテリジェントな通信機能により、不要な接触を減らし、圃場作業を最適化します。これらの機能を統合することで、多機能果樹園ロボットは作業員を保護し、持続可能な農業を支えています。
反復作業に自律型ロボットを活用することで、果樹園管理を変革できます。SINOSO SOROB 200のような農業用ロボットは、散布、除草、運搬、耕起を自動化します。これらの時間のかかる作業を手作業に頼る必要はもうありません。自律型除草ロボットは、高度なセンサーを使用して雑草を検知し、適切な処理を行います。このアプローチにより、精度が向上し、薬剤使用量を削減できます。果樹園の畝間を移動し、作物を識別し、障害物を回避するロボットのメリットを享受できます。これらの機械は連携して作業配分を最適化し、変化する圃場条件に適応します。
ロボットはパッチ噴霧器とキャノピー噴霧器による噴霧を自動化し、農薬使用量を最大 50% 削減します。
自律除草ロボットが機械的・熱的除草制御を実行し、作業品質を向上します。
輸送ロボットは収穫した果物を効率的に移動させ、時間と労力を節約します。
意思決定アルゴリズムは複数のロボットを調整し、スムーズな操作とリソースの割り当てを保証します。
果樹園に自律型ロボットを導入することで、資源の最適化を強化できます。適応型経路計画とGNSSナビゲーションにより、ロボットは正確な経路を辿り、無駄な移動とエネルギーを最小限に抑えることができます。ロボットは、オクツリーベースの3D点群最適化と改良されたRRTアルゴリズムを用いて、経路の滑らかさを向上させ、経路長を短縮します。これらの技術により、計画速度とサンプリングポイントの利用率が向上し、作業効率が向上します。
GNSSナビゲーションはロボットに正確な経路を提供し、農薬散布、除草、収穫作業の精度向上を可能にします。LiDARとビジョンシステムを組み合わせたセンサーフュージョンは、特に密集した樹冠下でのナビゲーション精度を向上させます。ロボットはUAV画像とディープラーニングから生成された果樹園のグローバルマップを活用し、樹列を検出し、効率的なルートを計画します。このアプローチにより、手作業の負担が軽減され、車両の動きが最適化されます。
V字型や結実壁型といった特殊なキャノピー構造を採用することで、リソース利用を最適化できます。これらの構造は、ロボットによる果実へのアクセス性と収穫効率を向上させます。人とロボットの協働により生産性がさらに向上し、予期せぬ状況への対応やロボットサブシステムのメンテナンスが可能になります。高度なスケジューリングアルゴリズムは、作業スケジュール、バッテリー充電、農薬補充を管理し、ダウンタイムと不要な動作を削減します。
側面 | データ/例 | 情報源/人物 |
|---|---|---|
労働コスト構成 | 労働コストは生産コストの約60%を占め、労働コストの50%は収穫コストである。 | ミッチ・マクナブ |
労働効率 | 無人運転技術により、1人の従業員が最大5台のトラクターを同時に操作できる | コナー・キングマン |
梱包作業の省力化 | 自動化により梱包ラインや剪定における手作業の必要性が減少 | ハイディ・モリス |
化学物質適用データ | Agworldソフトウェアで取得した詳細な散布データにより、コンプライアンス遵守とエーカーあたりの化学物質削減が可能になります。 | ハイディ・モリス |
化学最適化のためのIoTデバイス | 電子昆虫トラップとフェロモンディスペンサー(セミオスシステム)は、化学物質の使用とタイミングを最適化するためのデータを提供します。 | Semios CEO マイケル・ギルバート博士 |
ロボット収穫試験 | ロボットによるリンゴ収穫実験は、収穫に必要な労働力の削減を目指している。 | ミッチ・マクナブ |
自動化による労働への影響 | 自動化によりスタッフはよりスマートに働くことができるようになり、季節労働の追加の必要性が減ります。 | ハイディ・モリス |
これらのイノベーションから、目に見える成果が生まれます。ロボットが収穫と除草を担うことで、人件費は削減されます。精密な散布とデータに基づいたスケジュール管理により、農薬使用量は減少します。ロボットは疲労や天候の影響を受けずに24時間365日稼働するため、処理能力が向上します。果樹園管理のあらゆる側面において、作業時間の節約と作業品質の向上を実感いただけます。

果樹園で化学農薬を扱う際には、大きなリスクが伴います。手作業による散布は農薬への曝露を引き起こし、長期的には健康被害につながる可能性があります。自律型散布機は、この現実を変えます。これらの機械は自律的に作動するため、作業者は危険物質に直接触れる必要がありません。作業者は遠隔操作で作業を行い、自律型散布機が正確に散布作業を行います。
果樹園のような環境において、手作業による散布と自動移動式ロボット散布機を比較した科学的研究があります。その結果、自動散布機は作業者の生理学的ストレス指標を低下させることが示されました。心拍数は25%、脈拍数は75%、酸素消費量は42%、エネルギー消費量は41%減少しました。手作業による散布は、不快感と心臓への負担が3~6倍も高かったのです。自動散布機は、これらの健康被害を回避し、化学物質への曝露を減らすのに役立ちます。
ターゲットを絞った散布技術のメリットを享受できます。自律型散布機は、適応型圧力システムと振動ノズルを採用し、必要な場所にのみ薬剤を散布します。このアプローチにより、薬剤の飛散を最小限に抑え、葉全体を確実にカバーできます。薬剤使用量は40%削減され、お客様と作業員の被ばくリスクを軽減します。スマート散布機は残留物防止システムも搭載しており、薬剤との接触リスクをさらに低減します。
重機の操作や果樹園での反復作業には、身体的なリスクが伴います。自律型散布機は危険な作業を代替することで、これらの課題に対処します。重いタンクを持ち上げたり、手作業で不整地を移動したりする必要はもうありません。自律型散布機はクローラー式プラットフォームで移動し、人の介入なしに斜面を登り、荒れた地面を横断します。
リモートモニタリングにより、安全な場所から自動散布機を制御できます。機器の状態、バッテリー残量、薬剤量に関するリアルタイムのアラートを受信します。バッテリー残量低下やタンク空などの問題が発生した場合、自動散布機は自動帰還機能を作動させます。機械は自動的に供給地点に戻るため、事故のリスクを軽減します。
異常を常に把握するには、スマートアラートが役立ちます。センサーは故障、環境の変化、障害物を検知します。自律型噴霧器は即座に通知するため、迅速な対応が可能になり、怪我を防ぐことができます。危険区域に物理的に存在する必要がないため、滑って転倒したり、化学物質がこぼれたりするリスクを軽減できます。
最新の文献では、自律型果樹園ロボットの過去の負傷データは提供されていません。しかし、安全原則によれば、危険な作業から人間のオペレーターを排除することで、負傷リスクを低減できることが示唆されています。自律型散布機は、作業者と潜在的な危険との間に物理的な距離を確保します。作業者の健康を最優先する高度な安全階層構造の恩恵を受けることができます。
安全機能 | あなたを守る方法 |
|---|---|
リモートモニタリング | 情報を提供し、危険から遠ざけます |
自動返却 | バッテリー残量低下時の事故を防止 |
スマートアラート | 異常への迅速な対応が可能 |
クローラープラットフォーム | 人間の力に頼らずに荒れた地形にも対応 |
標的噴霧 | 化学物質の飛散と曝露を低減 |
果樹園で農薬を散布する際は、厳格な安全規制を遵守する必要があります。自律型散布機は、これらの基準を満たすのに役立ちます。これらの機械は、AIによるターゲティング、ドリフト低減、オペレーターの安全インターロックなどを活用し、作業者と環境を保護します。ISO18497:2018などの国際規格は、高度に自動化された農業機械の安全原則を定めています。自律型散布機には、障害物検知機能と警報機能が搭載されており、人や動物の安全を守ります。
カリフォルニア州労働安全衛生局(OSHA)ガイドラインなどの規制枠組みでは、特に農薬散布において、監視下での自律型機器の使用が認められています。これにより、化学物質への曝露が低減され、コンプライアンス遵守が促進されます。EUの法的枠組みでは、自律型噴霧器が安全指令を満たしていることを示す、統一規格とCEマークの取得が義務付けられています。
自律型噴霧器は、内蔵センサーを用いて振動、傾き、電圧、過負荷を監視します。ジオフェンシングは、立入禁止区域への立ち入りを防止します。環境センサーは、化学物質の濃度と空気の質を追跡し、緊急事態への迅速な対応を支援します。自律型噴霧器の安全な運用を確保するため、定期的なトレーニングとメンテナンスを推奨するベストプラクティスがあります。
自律型噴霧器には、あなたとあなたのチームを保護するための高度な安全機能が組み込まれています。
国際的および国内的な規制では、果樹園の管理をより安全にするために、自律型噴霧器の使用が推奨されています。
組み込みセンサーとスマートアラートにより、リアルタイムの危険検出とコンプライアンスが強化されます。
SINOSO SOROB 200のような収穫ロボットは、果樹園の生産性を飛躍的に向上させます。これらの機械は、高度なビジョンシステムと精密なマニピュレーターを搭載し、果物を驚くほど正確に識別、位置特定、収穫します。ロボット収穫機を導入することで、安定したパフォーマンスと省力化というメリットが得られます。SOROB X拡張モジュールを使用すれば、収穫と輸送のタスクを切り替えることができ、より柔軟な運用が可能になります。
収穫ロボットの有効性を評価するのに役立つ主要な指標は次のとおりです。
果物収穫効率 (FPE): 収穫された市場価値のある果物の割合を測定します。
果物収穫スループット (FPT): 単位時間あたりに収穫された果物の平均数を追跡します。
精度と再現率: ロボットが果物を検出して分類する能力を評価します。
平均精度 (mAP): 果物の種類全体にわたる検出性能を示します。
F1 スコア: 精度と再現率のバランスを表示します。
インスタンスセグメンテーション精度: ロボットが個々の果物をどれだけ正確に分離できるかを評価します。
Intersection over Union 3D (IoU3D): 3D 果物の位置特定精度を測定します。
経済的実現可能性: ピッキング速度、損傷率、収益性を考慮します。
ロボットのパフォーマンスは以下の表で確認できます。
メトリック | 値 | 説明/メモ |
|---|---|---|
収穫成功率 | 92% | 収穫に成功した果実の割合 |
ダメージ率 | 0% | 収穫中に損傷した果実の割合 |
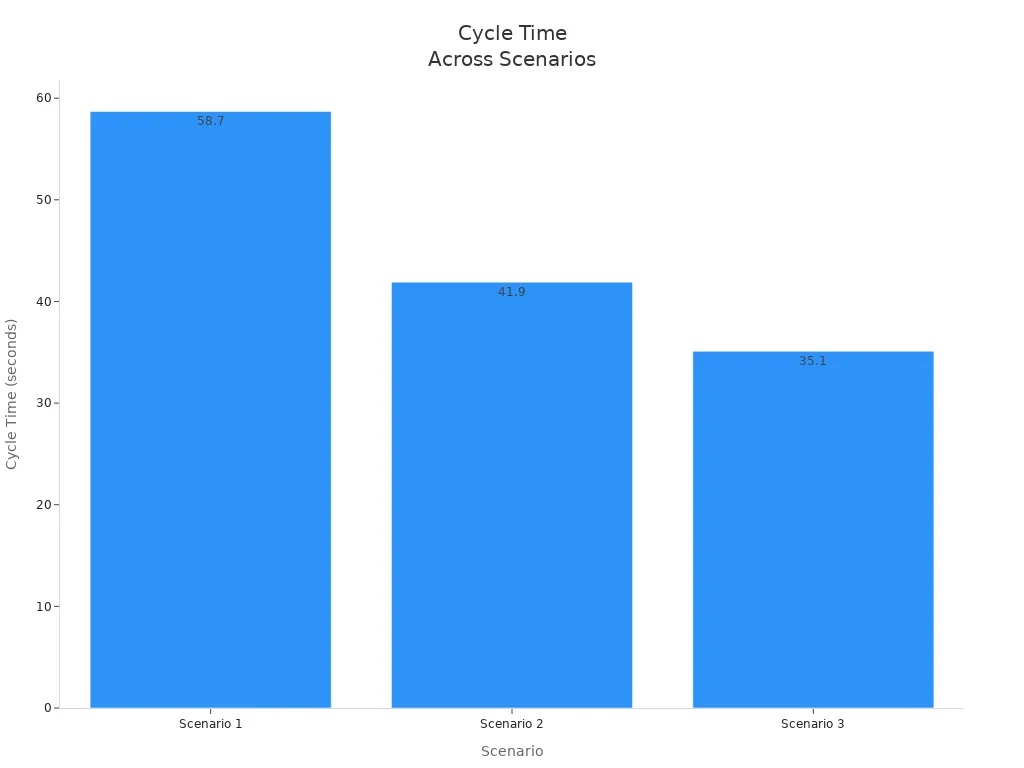
サイクルタイム | 58.7秒、41.9秒、35.1秒 | 収穫サイクルあたりの平均時間 |
正確さ | 4.5ミリメートル | ロボットの位置精度 |
再現性 | 5.23ミリメートル | 繰り返しの動作の一貫性 |
システム解像度 | 1 mm (x,y,z) | 最小移動量 |
さまざまなシナリオにわたってサイクルタイムの改善を視覚化することもできます。
収穫ロボットと従来の方法を比較すると、いくつかの違いに気づきます。手作業による収穫は依然としてより迅速かつ柔軟ですが、ロボットは精度と適応性において追いつきつつあります。例えば、
側面 | 果樹園ロボット(リンゴの収穫) | 伝統的な収穫方法 |
|---|---|---|
認識率 | 約81.73%~85% | 人間の知覚により一般的には高め |
収穫率 | 約86.92% | 通常100%に近い(手動選択) |
収穫の時期 | 果物1個あたり9.5~15秒 | ロボットよりも速い(手動ピッキング速度) |
適応性 | インテリジェントコンピューティングとビジョンシステムによって強化され、夜間でも自律的に動作できます。 | 人間の柔軟性による高い適応性 |
運用の柔軟性 | ハードウェアによる制限あり;新しいアルゴリズムで改善 | 高い柔軟性とスピード |
SOROB Xモジュールを使用すれば、システムを拡張して自動収穫・輸送機能を追加できます。この柔軟性により、変化する状況に迅速に対応し、シーズンを通して収穫量を最大化できます。 シノソ精密農業とインテリジェントな水管理の世界的リーダーであるは、この分野で革新を続けています。生産性を最適化し、持続可能な高収量農業をサポートするAI搭載ソリューションのメリットを享受できます。





電話 : +86-025-87150950
N0.2229, Tianyuan East Road, Jiangning District, Nanjing City, Jiangsu Province, China
伝言を残す






 +86-025-87150950
+86-025-87150950 globalsales@sinosorob.com
globalsales@sinosorob.com +86 15366193219
+86 15366193219